
Afgelopen week maakte ik filmopnames van een groep trainees en probeerde ook nog wat opnames van het gebouw te maken waarin het traineeship werd gegeven. Dat werd mijn drone, een DJI Spark, fataal: door een vooralsnog niet duidelijke oorzaak probeerde de drone het gebouw in te vliegen en crashte van 65 meter hoogte op de straatstenen.
De crash
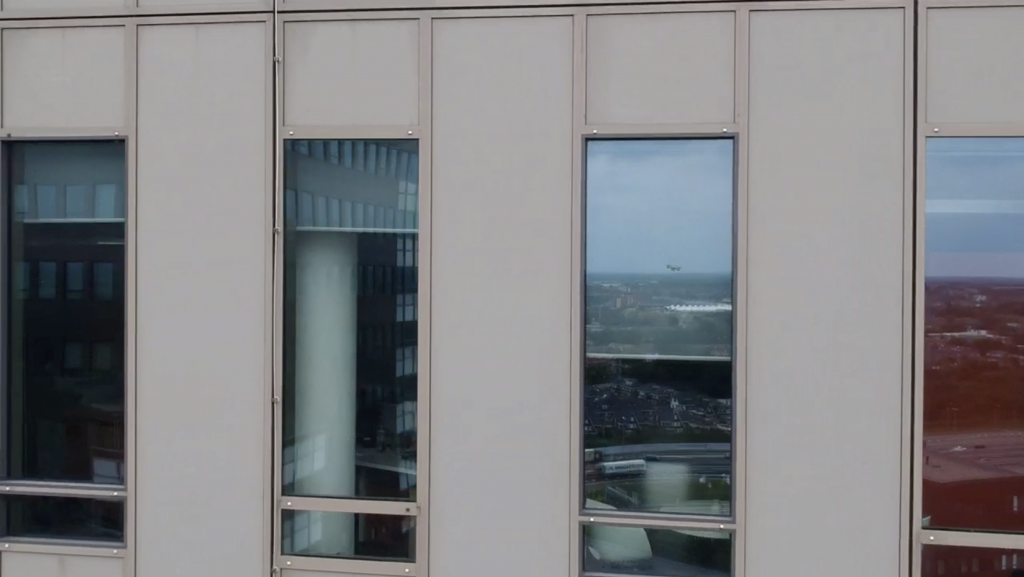

Voorafgaande aan de crash was de drone op de gewenste hoogte van ongeveer 65 meter (18e verdieping) op een meter of vier afstand van het gebouw. De bedoeling was om van de voorzijde van dat gebouw naar de zijkant ervan te vliegen en daarbij de camera op de ramen gericht te houden. Aan alle kanten rondom het gebouw was voldoende ruimte en onder het vluchtpad van de drone liep een brede stoep. Geen gevaar voor wandelaars of passerende auto’s. Er liep wel iemand te filmen op een meter of twintig afstand hetgeen ook de ‘live stuiterfoto’ hierboven opleverde.
Als piloot kon ik de hele situatie overzien, hoewel de drone zelf met de zon in de rug maar net zichtbaar was. Het vliegen aan de voorkant ging prima, de rotatie op de hoek ook. Ik kreeg een melding dat de maximale vlieghoogte was bereikt en heb dat in het menu veranderd. Toen ik met de drone de hoek om ging, ging het mis: de drone vloog steeds dichter naar het gebouw en stuiterde tegen het glas, verloor een propeller (deze viel het eerst op straat en de drone viel hulpeloos naar beneden.
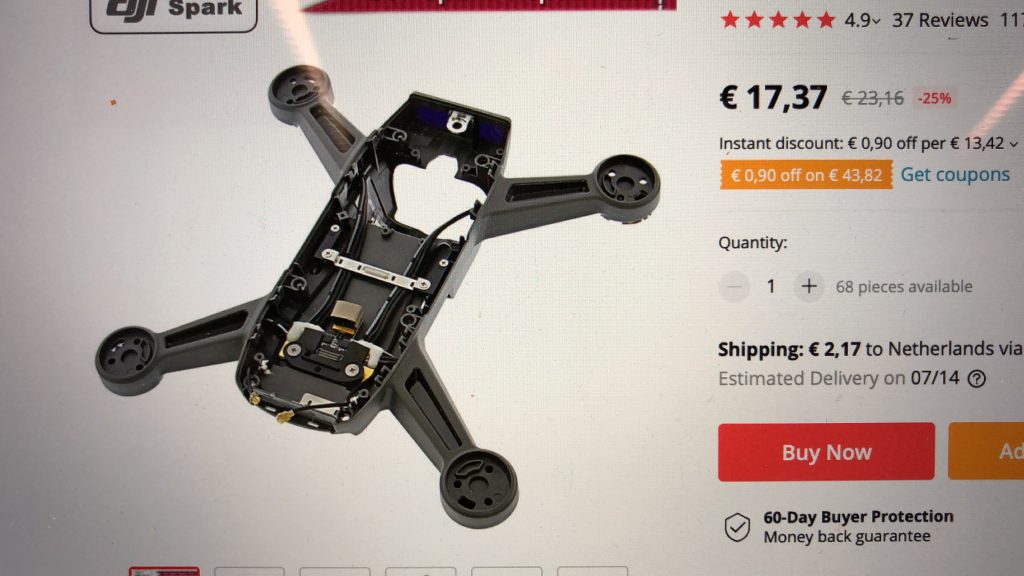
Na de crash hielpen omstanders de losse onderdelen te verzamelen. De drone zag er toen uit als op onderstaande foto: twee gebroken rotorarmen en een volledig total loss batterij. Ik heb de drone eerst maar eens in de koffer opgeborgen en later de schade beoordeeld.
De gimbal is zo op het oog nog intact (zit aan de andere kant van de gebroken rotorarmen) en de behuizing lijkt onbeschadigd. Ook de motoren draaien nog en de elektronica lijkt het nog te doen. Alle losse onderdelen waren verzameld, inclusief de dopjes en de veertjes. Alleen het micro-SD kaartje met de film die op het moment van de crash werd gemaakt ontbrak en zal waarschijnlijk nog op de plek van de crash liggen.

Na de crash heb ik de vluchtanalyse van de DJI Go 4 app geladen en het gelinkte filmpje gemaakt om aan de hand hiervan de omstandigheden en de oorzaak van de crash te analyseren. Dat is nog niet zo eenvoudig, het lijkt zo op het eerste gezicht een navigatiefout, maar het is nog onduidelijk of het te voorkomen was. Ook is het onduidelijk of er problemen waren met de GPS ontvangst.
Waarschijnlijk vervang en/of restaureer ik de drone binnenkort, maar het is wel belangrijk om niet weer dezelfde problemen te krijgen. Tips en adviezen? Laat het me weten!
De restauratie
Het lijkt te doen om een ernstig beschadigde DJI Spark te herstellen, door het frame te vervangen door een nieuw exemplaar. Dat heeft natuurlijk alleen zin als de andere onderdelen (interne vluchtregelaar, gimbal en camera, motoren) nog bruikbaar zijn. Zo’n frame is na te bestellen en kost een kleine 20 euro. Het frame is dan al voorzien van nieuwe bedrading voor de motoren.
Dank zij YouTube heeft iedereen de beschikking over de opgenomen ervaringen van anderen. Adamant IT, ‘a small computer repair shop in Shaftesbury, England’ repareerde al eens een DJI Spark met soortgelijke schade als de mijne en dankzij de zorgvuldig gedocumenteerde demontage-montagevideo had ik de Spark in geen half uur in onderdelen op de werkbank liggen.
Zo op het oog leken alleen het frame, de accu en de propellers gesneuveld. Ik ben daarom maar eens begonnen met het bestellen van een nieuw frame.
Het nieuwe frame bevat de draden naar de motoren en enkele subassemblages. Ik heb het demonteren alle onderdelen op kleine papiertjes met een schets van de subassemblage geplakt, zodat er maar een klein risico was dat ik het geheel niet weer precies in elkaar zou krijgen. De kleine connectoren die met iets van siliconenkit waren gefixeerd waren lastig los te maken; met een pincet verwijderen van de kit bleek een goede aanpak.
Voor het demonteren en monteren heb ik het volgende gereedschap gebruikt:
- Kruiskop schroevendraaiers
- Torx schroevendraaiers
- Pincet
- Desoldeerbout
- Soldeerbout
- Derde handje voor het solderen van de motoren en snelheidsregelaars
- Papier, plakband, potlood, zipzakjes en watervaste stift om onderdelen van subassemblages te documenteren, vast te plakken en in zakjes in volgorde te bewaren tot de assemblage

Na de montage met een nieuwe accu de drone aan DJI’s Assistant software gehangen. Ik kreeg een foutmelding dat een motor defect was. Mij leek dat sterk, die motoren zien eruit alsof ze wel tegen een stootje kunnen dus ik heb naast twee nieuwe motoren ook twee snelheidsregelaars besteld. Uiteindelijk bleek dat er inderdaad twee snelheidsregelaars defect waren en geen motor. Na het vervangen van beide snelheidsregelaars en het bijwerken van de software daarvan leek alles weer te werken. Ik heb de drone voorzien van een nieuwe, groene afdekplaat: DJI Spark Groen, klaar voor een proefvlucht.
De proefnemingen

De proefvlucht op lage hoogte op een afgelegen veldje leek in eerste instantie heel succesvol, maar leverde na een paar minuten een problematische situatie op: de drone werd onbestuurbaar. Ik kon de drone nog net landen, voor hij op de vlucht was geslagen. De onbestuurbaarheid leek nog het meest op het wegdrijven in de lucht: de drone reageerde accuraat op de afstandsbediening, maar deed geen enkele moeite om stil in de lucht te blijven hangen als er geen signalen van de afstandsbediening binnenkwamen. Analyse van de vluchtgegevens leverde het volgende beeld:
In de documentatie van de DJI Spark staat vermeld, dat bij voortdurende kompasfouten de GPS module wordt uitgeschakeld. Persoonlijk zie ik daar de logica niet van, maar het verklaart het feit dat de drone ervandoor wilde gaan: zonder kompas en GPS is een drone aan de elementen overgeleverd1 en het waaide stevig op de testdag.
Een test van het kompas ging eenvoudig via de DJI GO 4 app, waar je de metingen van het kompas op het scherm getoond ziet. Viel gelijk op dat er alleen toevalsgetallen getoond worden: 34, 256, 2, 312, 2, 128, .. Ook het calibreren van het kompas ging steevast met een foutmelding gepaard.
Het was even zoeken waar de compas in de DJI Spark zit: bij de GPS module, op de hoofdprint, op de IMU module of op de 3D Vision module. Ik heb na wat Duck-Duck-Go-en op de 3D Vision module gegokt. De 3D Vision module zit voorin de drone, met hierop een camera, een afstandsmeter en (hopelijk) het elektronisch kompas. Ik heb er een gebruikte vervanger uit China voor laten komen.
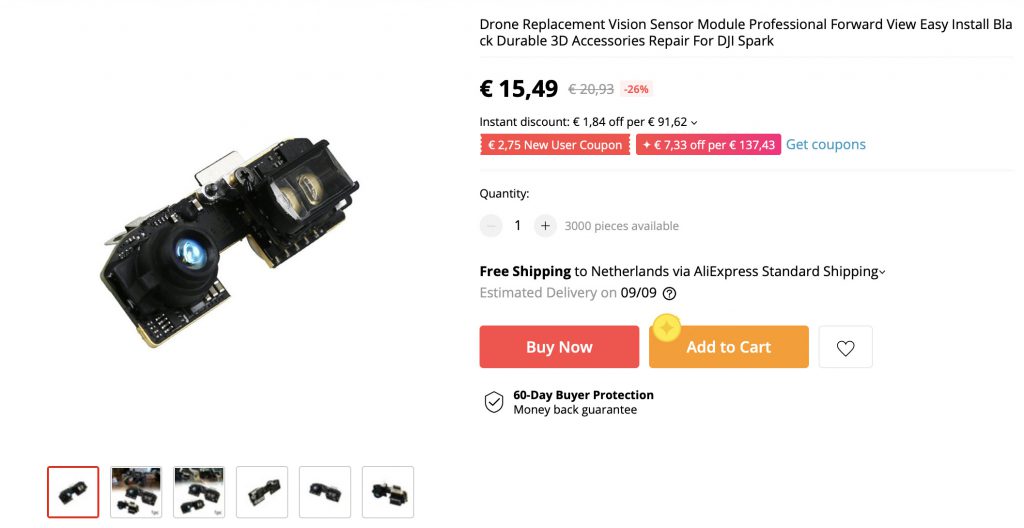
Het vervangen van de 3D Vision module ging eenvoudig: een handjevol kruiskopschroeven losdraaien, een connectortje lospeuteren en overzetten op de nieuwe printplaat en de boel kon weer terug. Gelijk in de DJI GO 4 applicatie de metingen van het kompas bekeken en die waren heel anders dan de oude: stabiele waarden die afhankelijk van de draaiing van de Spark tussen de 0 en 1000 zaten. Ook de kompascalibratie ging nu foutloos.
Ik heb alle connectors voorzien van wat schilderskit (tandenstokertjehoeveelheid). Er wachten nog een paar testen maar ik durf te stellen dat de kans groot is dat de drone weer zo goed als nieuw is.
Bill of Materials:
- Frame, inclusief bedrading € 17,37
- 2 snelheidsregelaars 2 x € 10,48
- 3D Vision module € 15,49
- Nieuwe groene afdekplaat (niet nodig, wel mooi) € 9,31
Totale reparatiekosten: € 63,13
- Technisch gezien zou de accelerometer of de naar-beneden-gerichte camera driften moeten kunnen voorkomen. In de praktijk is hier door DJI niet voor gekozen. ↩︎
Hallo Jacques,
als je zoekt op AliExpress op de zoektermen “dji spark frame” dan vind je ze. Alle frames zijn voorzien van bedrading.
Kan ik nog een vraag stellen over het frame met bedrading van de Spark. Ik kan de advertentie op Ali niet vinden, heeft u een URL voor mij? Vast bedankt