Mijn DJI Phantom 2 heeft een heuse navigatie- en besturingscomputer aan boord, die gebruikmaakt van gyroscoop, GPS, batterijspanning en instructies van de afstandsbediening om vier motoren aan te sturen. Deze navigatiecomputer, de Naza-M, heeft informatie over de positie en bewegingen van de quadcopter. Informatie die je als gezagvoerder eigenlijk bij de hand wilt hebben: het maakt het vliegen veiliger en doeltreffender als je weet waar de neus van de quadcopter heen wijst, en hoeveel batterijlading er nog resteert.
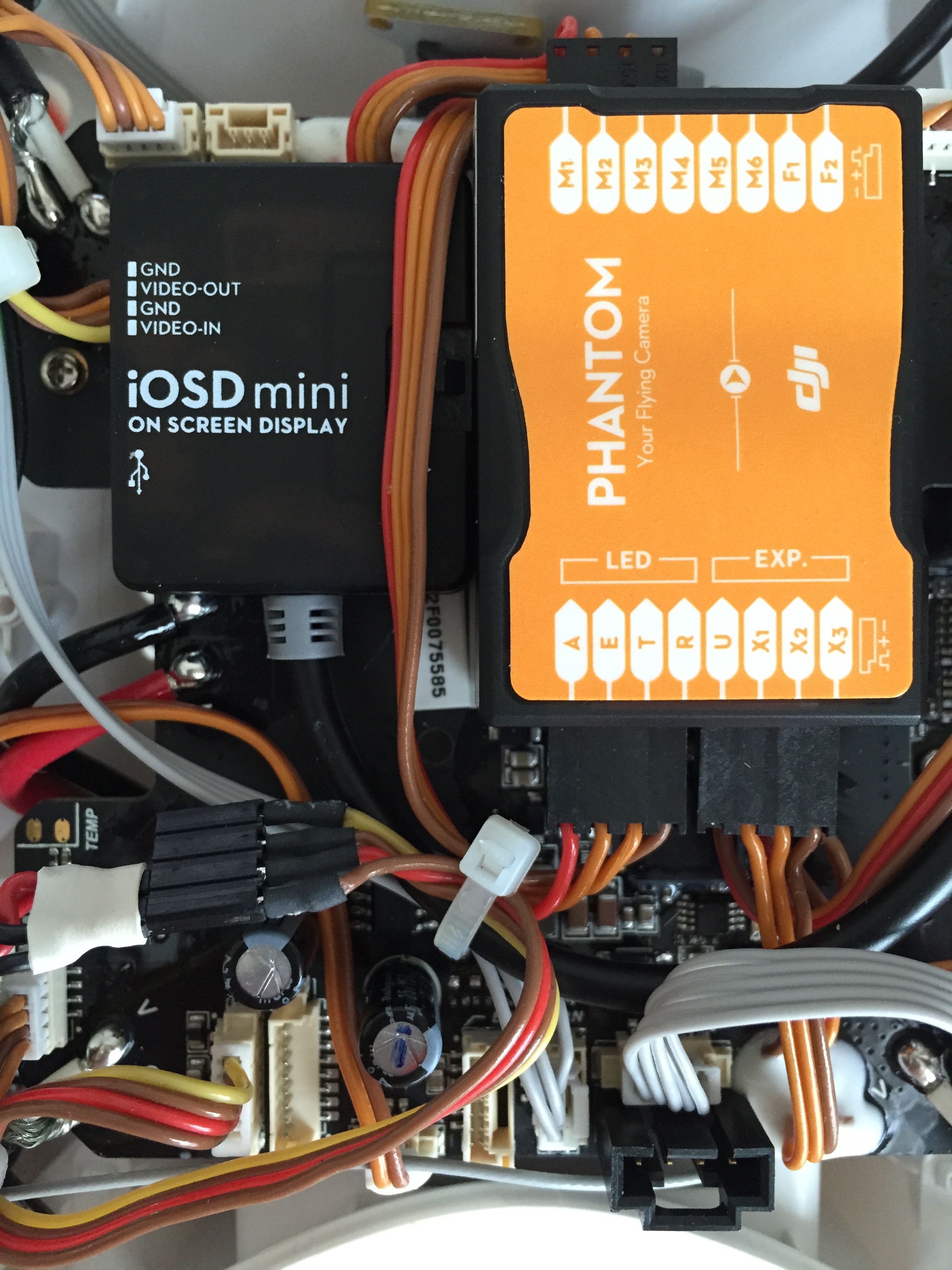
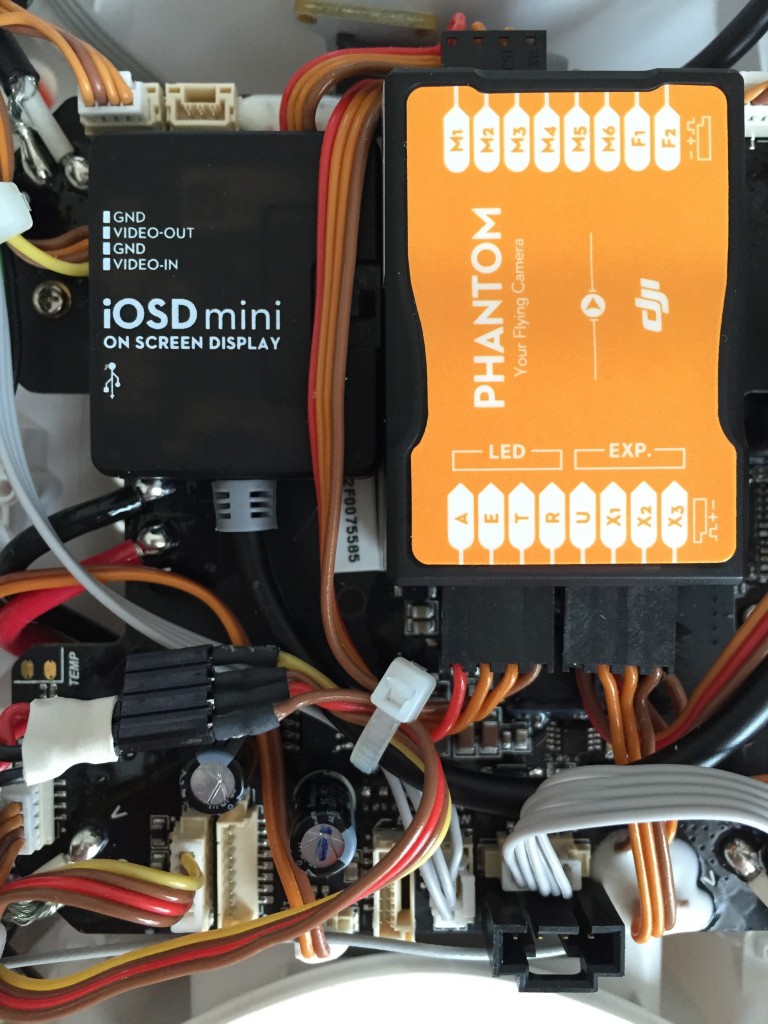
DJI heeft voorzien in deze behoefte met een kleine uitbreidingsmodule waarmee de informatie van de navigatiecomputer aan een videoverbinding kan worden toegevoegd: de DJI iOSD mini. Deze kleine module wordt middels een CAN-bus met de navigatiecomputer verbonden. Alleen de bedrading voor de videoverbinding vereist nog wat knutselwerk. Er is in de DJI Phantom 2 net voldoende ruimte naast de navigatiecomputer om de OSD module, met wat dubbelzijdige tape, permanent een handige plaats te geven. In de afbeelding hieronder is links de kleine zwarte OSD module te zien en rechts de oranje navigatiecomputer.
De iOSD mini levert de volgende informatie op:
- Accuspanning van de Phantom 2 in volt en percentage bedrijfsduur
- Vertikale afstand tot de thuispositie in meters
- Horizontale afstand tot de thuispositie in meters
- Vluchtmodus (GPS, ATT, Manual)
- Autopilot modus (Fail Safe, Ground Station, Go Home)
- Pitch hellingshoek (neus omhoog of omlaag)
- Roll kantelingshoek
- Horizontale snelheid in meters per seconde
- Aantal ontvangende GPS satellieten
- Richting van de neus ten opzichte van de thuispositie
- Vertikale luchtsnelheid
- Kunstmatige horizon
- Kompas status
