Ik kocht vorig jaar via AliExpress een tweetal low-cost Heltec ESP32 modules met ingebouwde SX1276 LoRa radio en een OLED display. Het doel was om hiermee een mobiele CO2 detector te maken, maar ik kwam er niet aan toe om ervaring met de modules op te doen. Gisteravond had ik die gelegenheid wel en kwam tot de conclusie dat het nog niet zo rechtlijnig aansluiten was.
De Heltec WiFi LoRa 32 is een ESP32 development module met Bluetooth, WiFi, LoRa en USB connectiviteit. Voor Bluetooth en WiFi zijn antennes ingebouwd, voor LoRa is een MHF (U.FL, I-PEX) socket aanwezig. Je kunt de Heltec modules via AliExpress verkrijgen; let erop dat je voor de in Nederland ondersteunde 868MHz versie gaat. Het huidige versienummer is V2, ik maak nog gebruik van V1. Op sommige plaatsen in de software moet hiervoor iets worden aangepast.
De module heeft een 0,96″ blauw-zwart OLED display ingebouwd met een resolutie van 128 x 64 pixels. Hiernaast kan er een LiPo accu worden aangesloten en ook in ingebouwde acculader is voorzien, waarbij de accu dan via USB wordt opgeladen. De Heltec module is voorzien van een Arduino bootloader en wordt via de Arduino omgeving geprogrammeerd, hoewel voor de ESP32 microcontroller ook andere alternatieven voorhanden zijn.
De Heltec WiFi LoRa 32 modules zijn op dit moment de goedkoopste manier om een LoRaWAN oplossing te maken: voor een kleine 15 euro heb je een volledig werkende oplossing om bijvoorbeeld een sensor met The Things Network (KPN LoRa zal even goed werken) te verbinden.
Voorbereiden van The Things Network
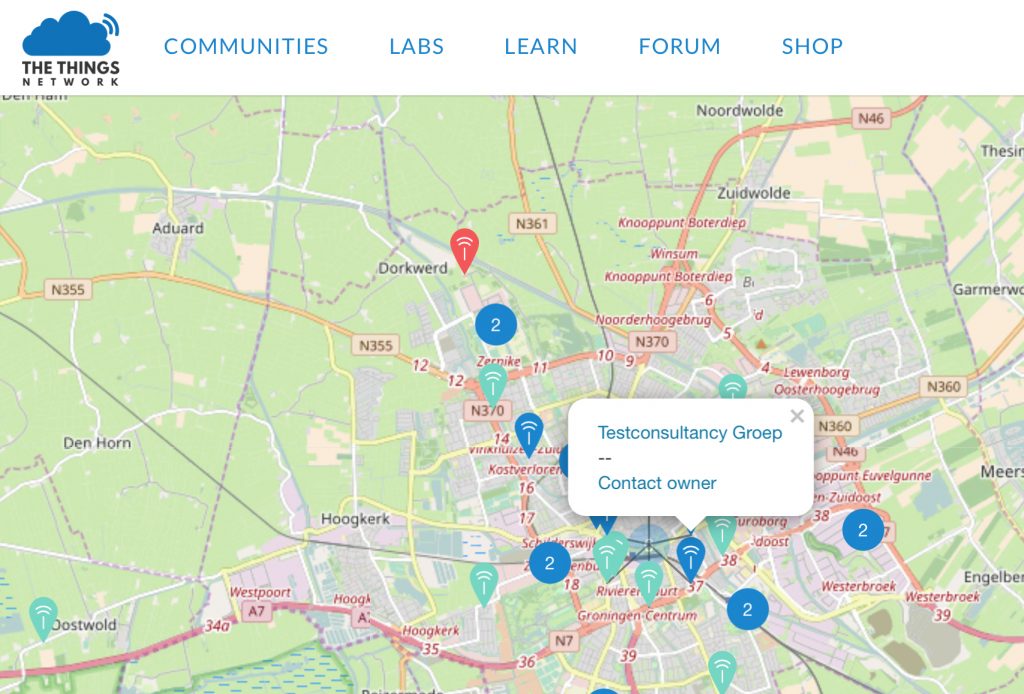
Om gebruik te maken van The Things Network is een account nodig. Maak deze aan als je dat nog niet eerder had gedaan. In je account kun je naar de Console, waar je kunt kiezen tussen Applications en Gateways (als je zoals ik een eigen gateway tot je beschikking hebt).
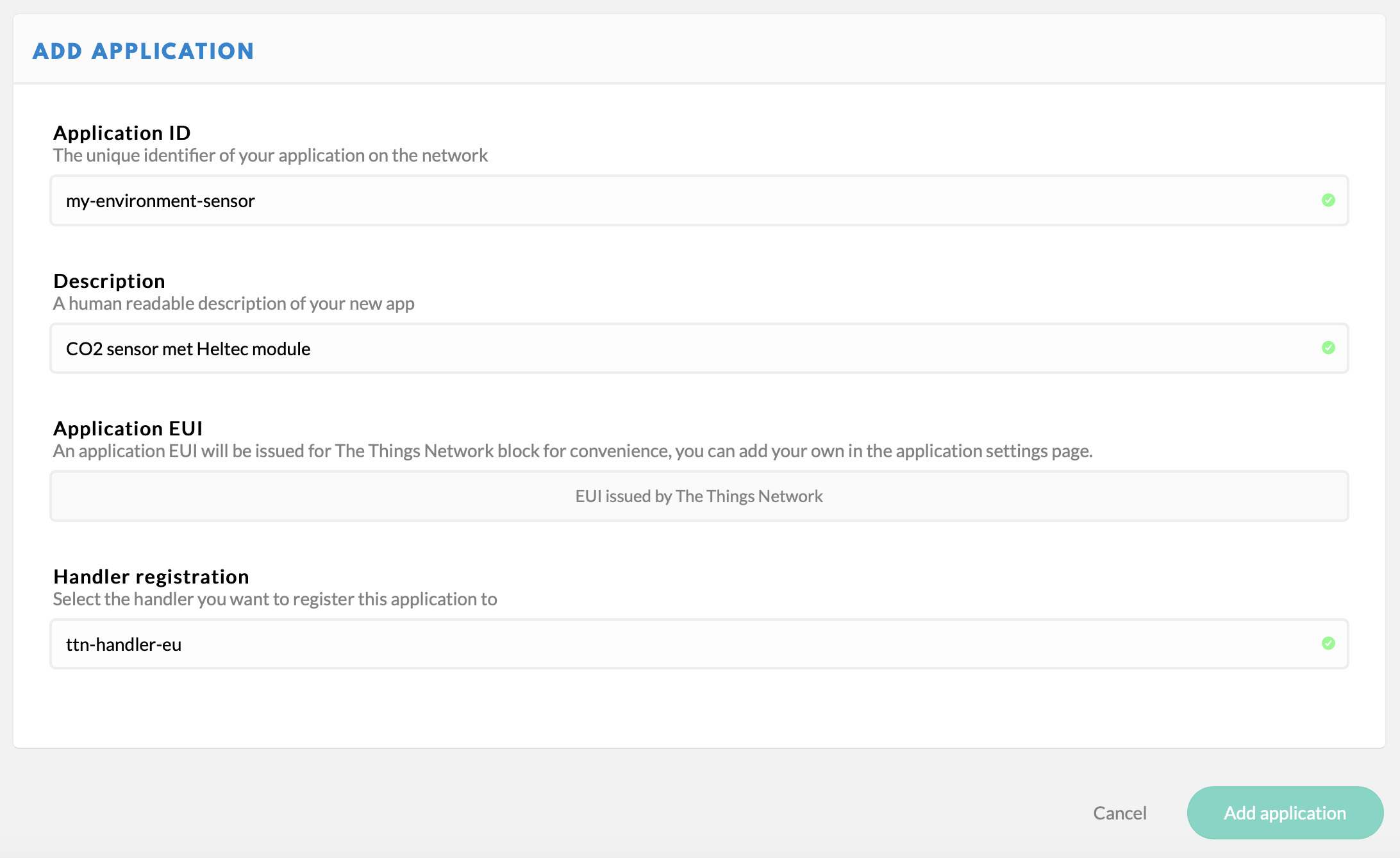
Ga naar Applications en maak indien nodig een nieuwe Application aan. Je kunt meerdere Devices, zoals de Heltec module, binnen een Application gebruiken, maar als je een specifieke toepassing hebt is het handig hiervoor een aparte Application aan te maken. Heel veel informatie is hier niet voor nodig: een technische naam (kleine letters, geen spaties) en een omschrijving is voldoende. Klik dan op Add application. De technische naam moet uniek zijn binnen The Things Network. Omdat je niet kunt inzien welke namen al in gebruik zijn, zul je wat moeten experimenteren. The Things Network genereert nu een Application EUI.
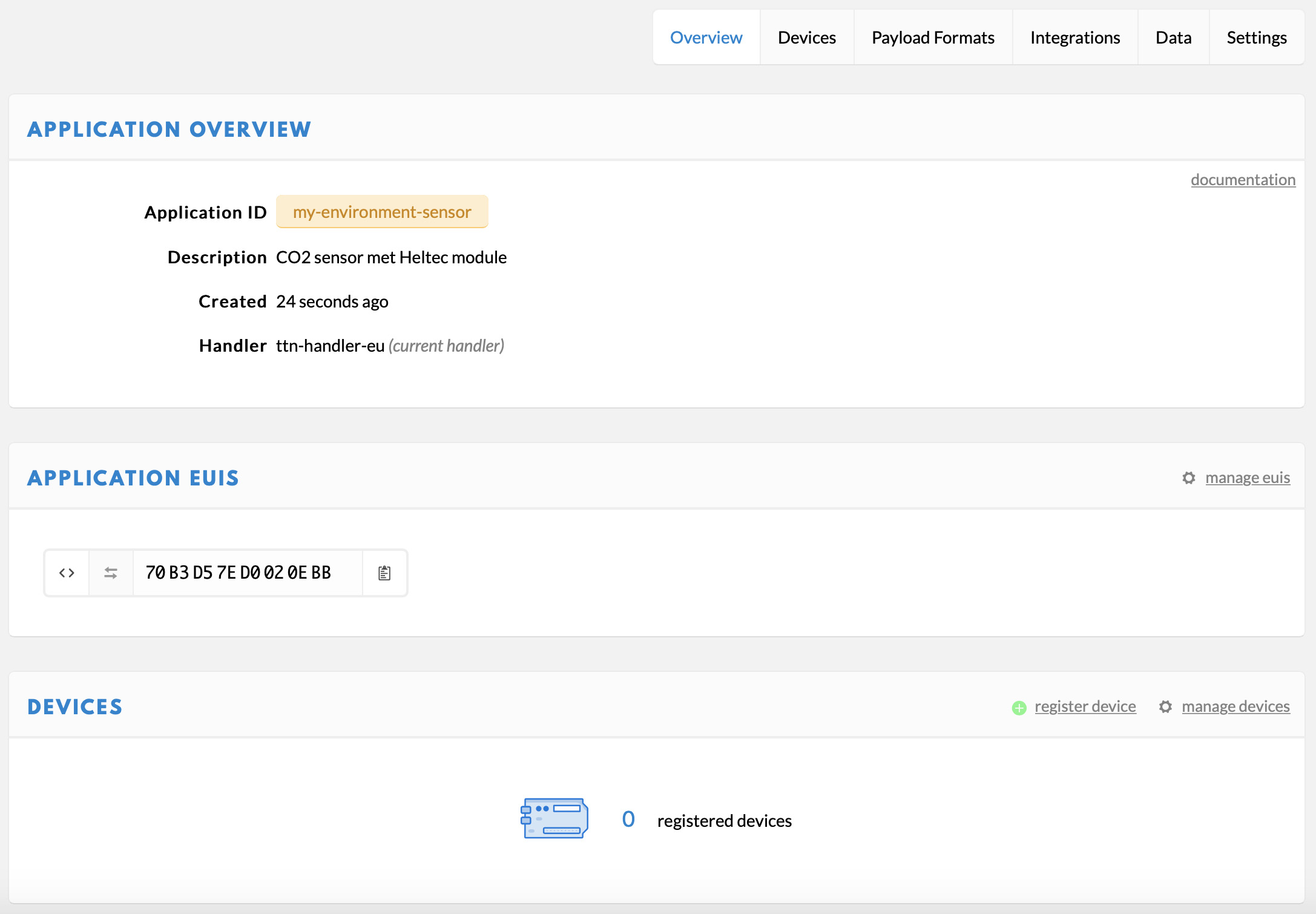
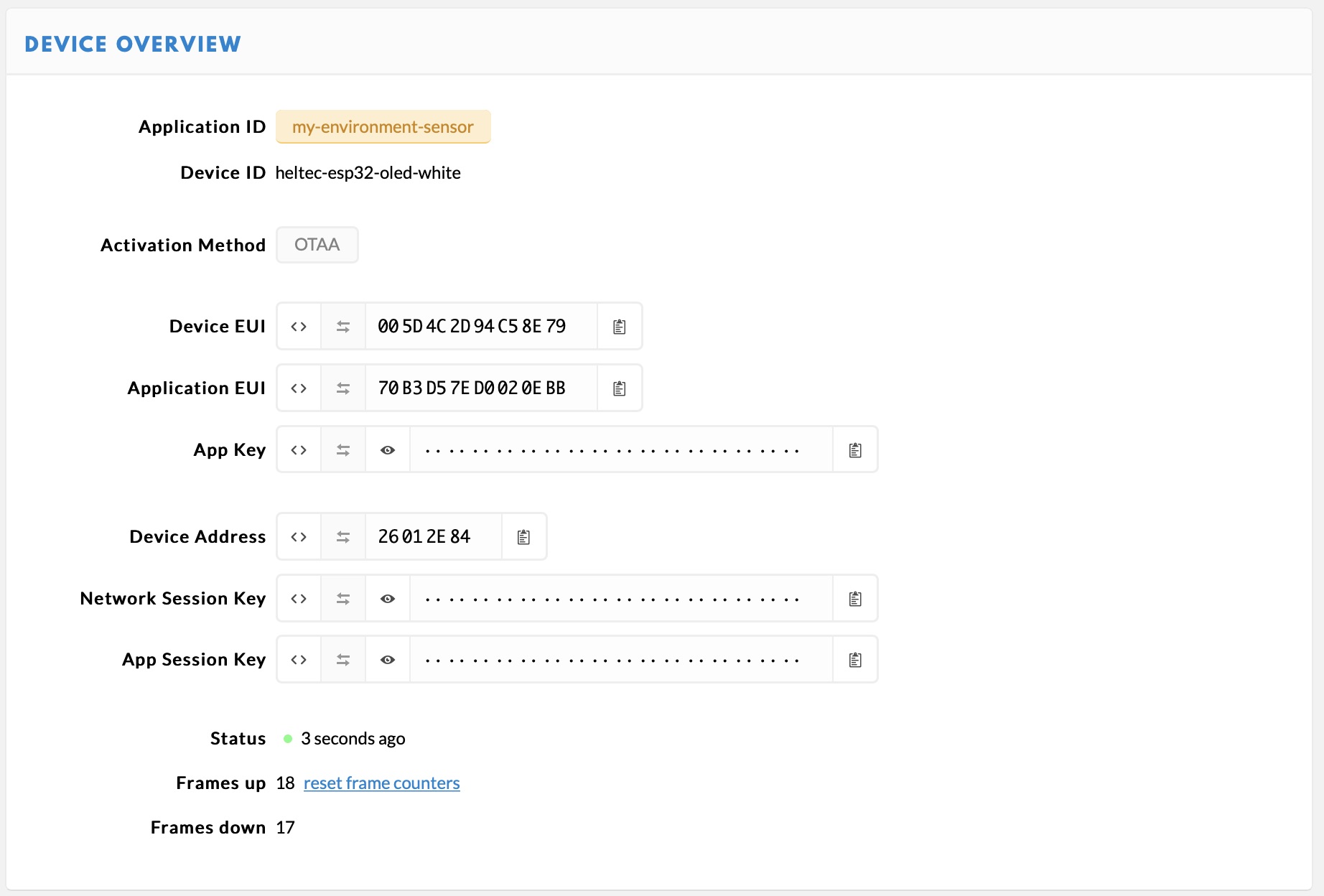
Na het toevoegen van je Application kom je in het overzichtsscherm terecht, waar je een Device aan je Application kunt toevoegen. Ook zie je hier het door The Things Network gegenereerde Application EUI, een reeks van acht hexadecimale getallen, in het voorbeeld 70 B3 D5 7E D0 02 0E BB.
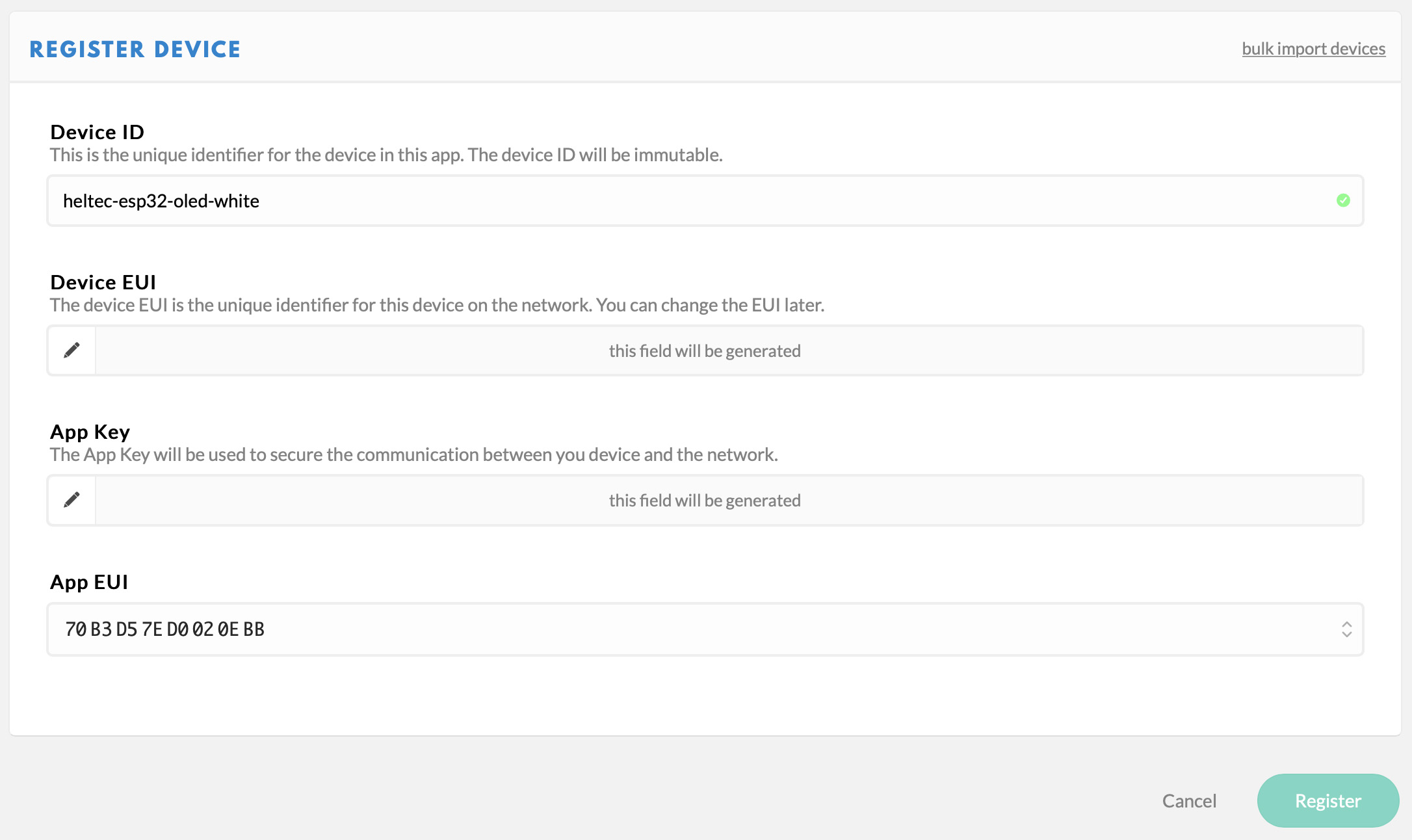
Gebruik Register device om de Heltec WiFi LoRa 32 module aan The Things Network toe te voegen. Ieder device moet worden voorzien van een Device ID, een identificerende technische naam. Later kan hier ook een ‘human friendly’ Description aan worden toegevoegd. Klik in het Register device scherm op het icoon gelijk onder Device EUI. De tekst in het vak wordt dan ’this field will be generated’. Device EUI, App Key en App EUI worden later gebruikt in de software van de Heltec WiFi LoRa 32 module. Klik voor nu op Register.
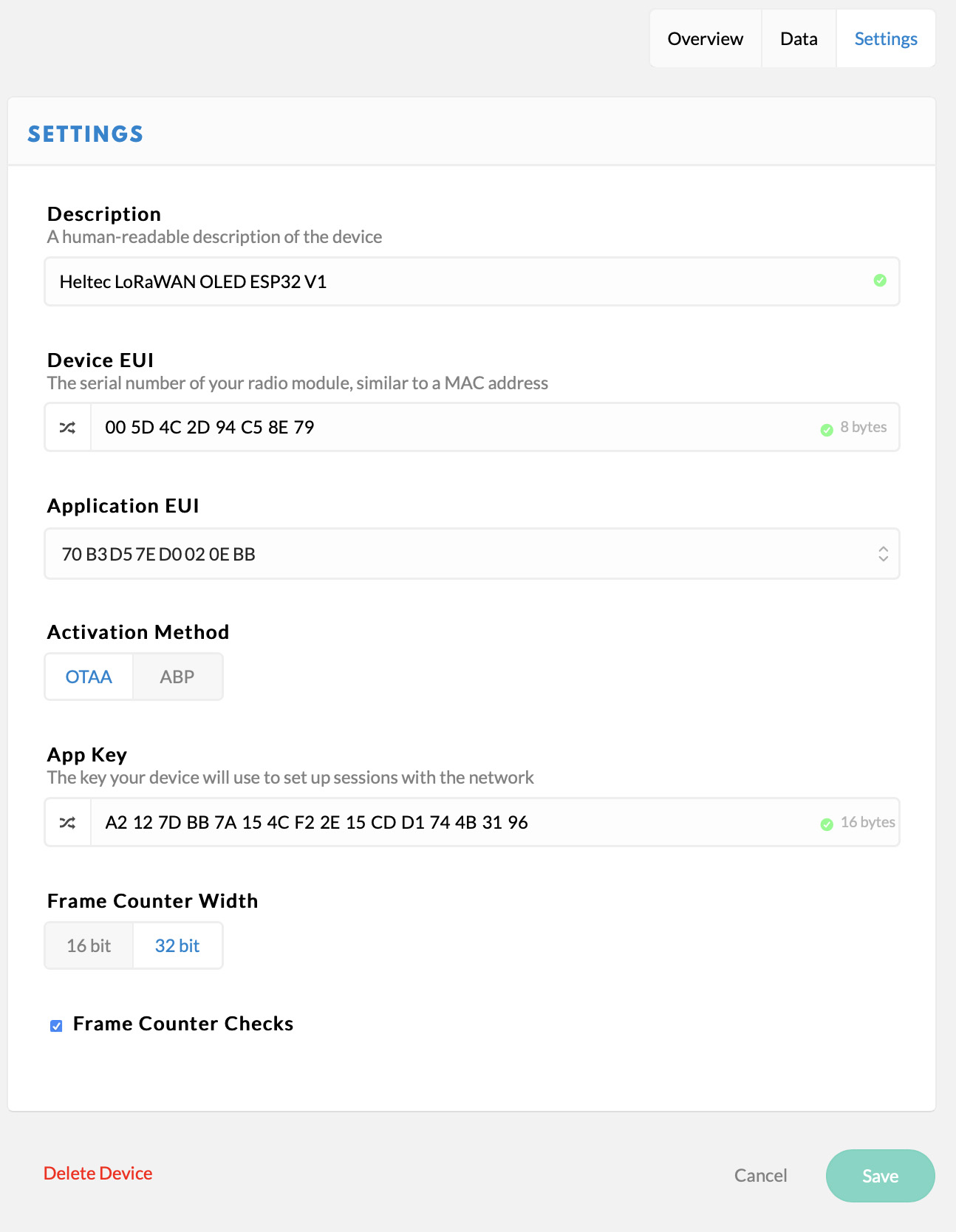
Nadat het Device is toegevoegd kunnen enkele eigenschappen worden aangepast in het Settings scherm. Geef hier een begrijpbare naam aan als Description. Laat Activation Method op OTAA (Over The Air Activation) staan. We gaan straks naar dit scherm terug om de Device EUI, Application EUI en App Key over te nemen in de software van de Heltec module.
Voorbereiden van de Arduino omgeving
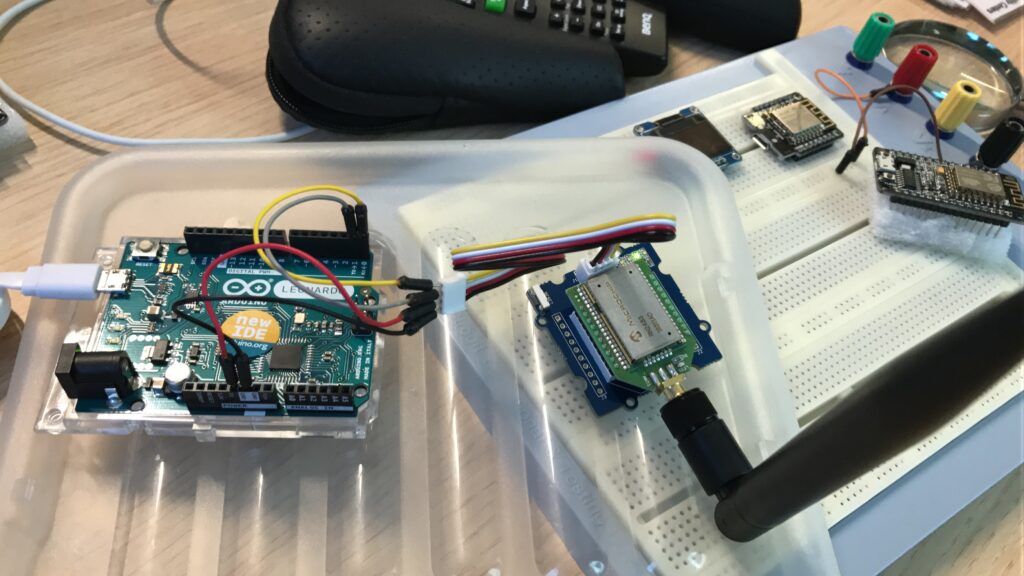
Begin met het aansluiten van de LoRa antenne op de module; het inschakelen van de module zonder, of met een verkeerde antenne kan schadelijk zijn voor de LoRa radio. De voor LoRa gebruikte frequentie in Nederland is 868 MHz.
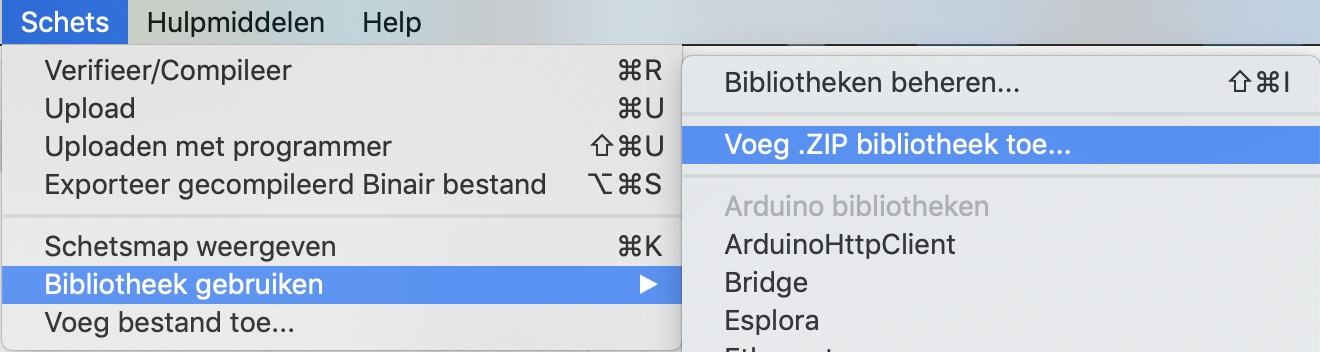
Download de codebibliotheek als .ZIP bestand van Heltec en voeg dit .ZIP bestand toe aan de bibliotheken in de Arduino ontwikkelomgeving met Schets > Bibliotheek gebruiken > Voeg .ZIP bibliotheek toe…
Er moeten 3 zaken ingesteld worden, voor we met de software aan de slag kunnen:
- Om gebruik te kunnen maken van de Heltec codebibliotheek, is per module een licentie van Heltec nodig. V2 modules kunnen de code elektronisch vinden, voor V1 modules moet je een email naar Heltec sturen. In beide gevallen moet eerst het Chip ID met een Arduino sketch worden opgevraagd
- In het bestand Commissioning.h moeten de Device EUI, Application EUI en App Key worden opgenomen (voor iedere volgende module moet dit bestand opnieuw worden aangepast)
- In het bestand LoRaMac-definitions.h moet de juiste frequentieband worden ingesteld
Kies in de Arduino omgeving de juiste poort en het juiste bord (Heltec WiFi LoRa 32). Laad de volgende sketch om de Chip ID op te vragen:
uint64_t chipid;
void setup() {
Serial.begin(115200);
}
void loop() {
chipid = ESP.getEfuseMac(); // 6 bytes
Serial.printf("ESP32 Chip ID = %04X", (uint16_t) (chipid>>32));
Serial.printf("%08X\n", (uint32_t) chipid);
delay(3000);
}In de Seriële monitor van de Arduino omgeving wordt iedere drie seconden het Chip ID van de module getoond, in mijn geval:
ESP32 Chip ID = A01B56A4AE30
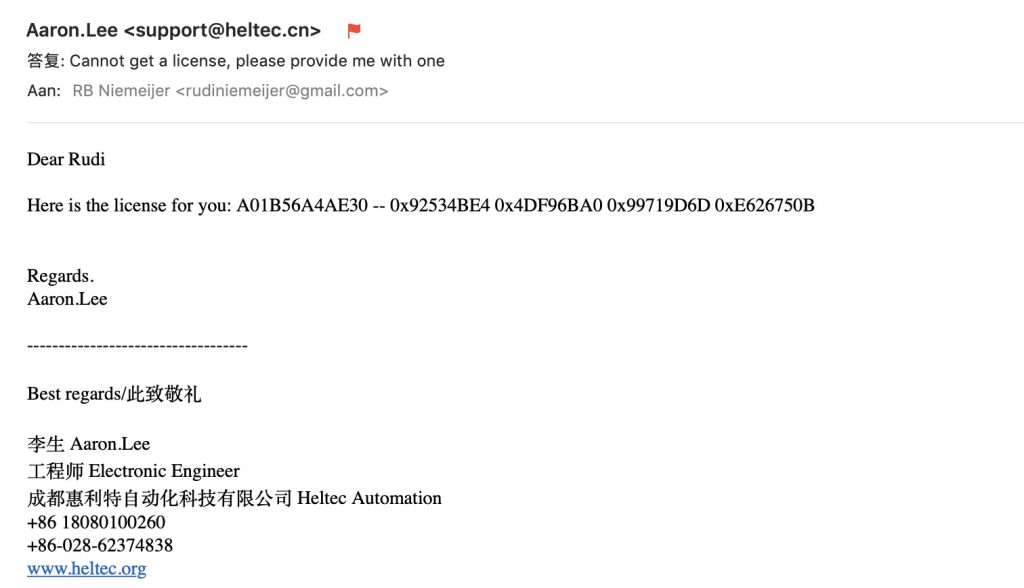
Ga in het geval van een V2 module (op de printplaat staat duidelijk ‘V2’) naar de Heltec website, waar het licentienummer voor dit Chip ID wordt getoond. In het geval van een V1 module dien je een email aan Heltec te sturen. Ik had binnen een half uurtje een reply email met de volgende tekst:
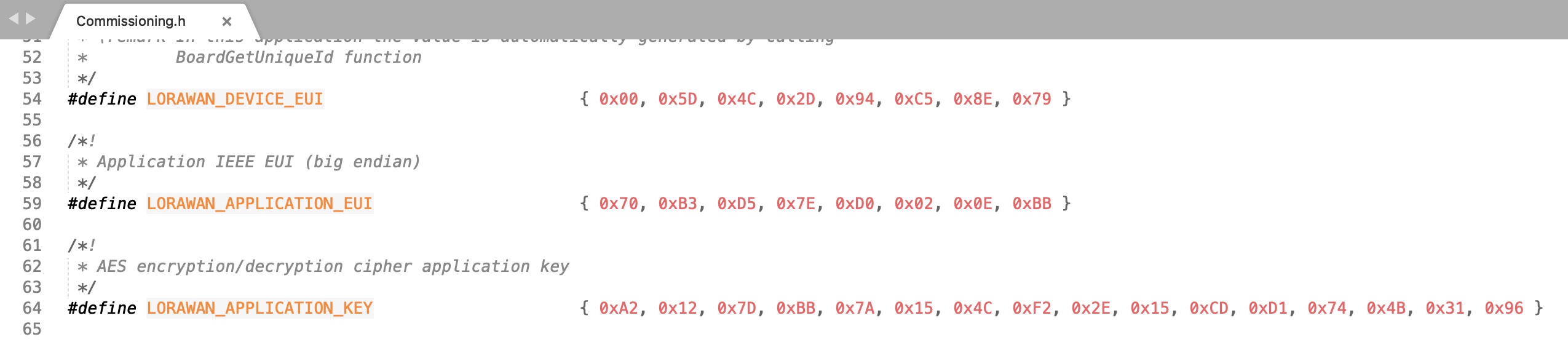
Zoek het bestand Commissioning.h. Dit staat waarschijnlijk in Arduino\libraries\ESP32_LoRaWAN-master\src. Wijzig de volgende definities in dit bestand:
#define LORAWAN_DEVICE_EUI #define LORAWAN_APPLICATION_EUI #define LORAWAN_APPLICATION_KEY
Geef hier de waarden op uit het Settings scherm van het Device van The Things Network:
Bewaar dit bestand en open het bestand LoRaMac-definitions.h dat in dezelfde map staat als Commissioning.h. Wijzig de regel met #define USE_BAND_470 in #define USE_BAND_868. Bewaar het bestand.
Verbinding maken met The Things Network
Laad de voorbeeldsketch Bestand > Voorbeelden > ESP32_LoRaWAN > OTAA. Wijzig in de sketch de regel met LICENSE[4] naar het licentienummer dat van Heltec, voor deze module, is verkregen:

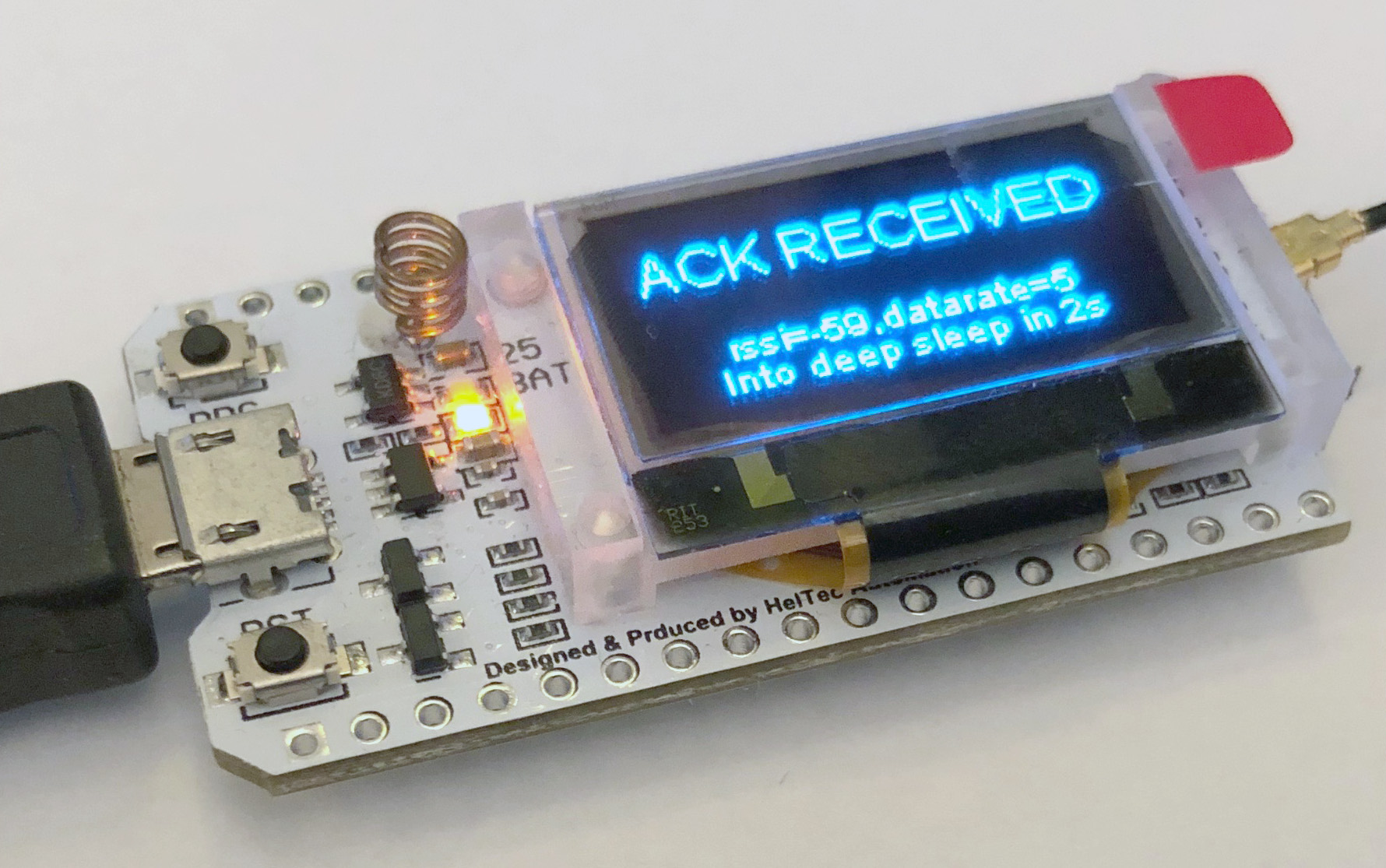
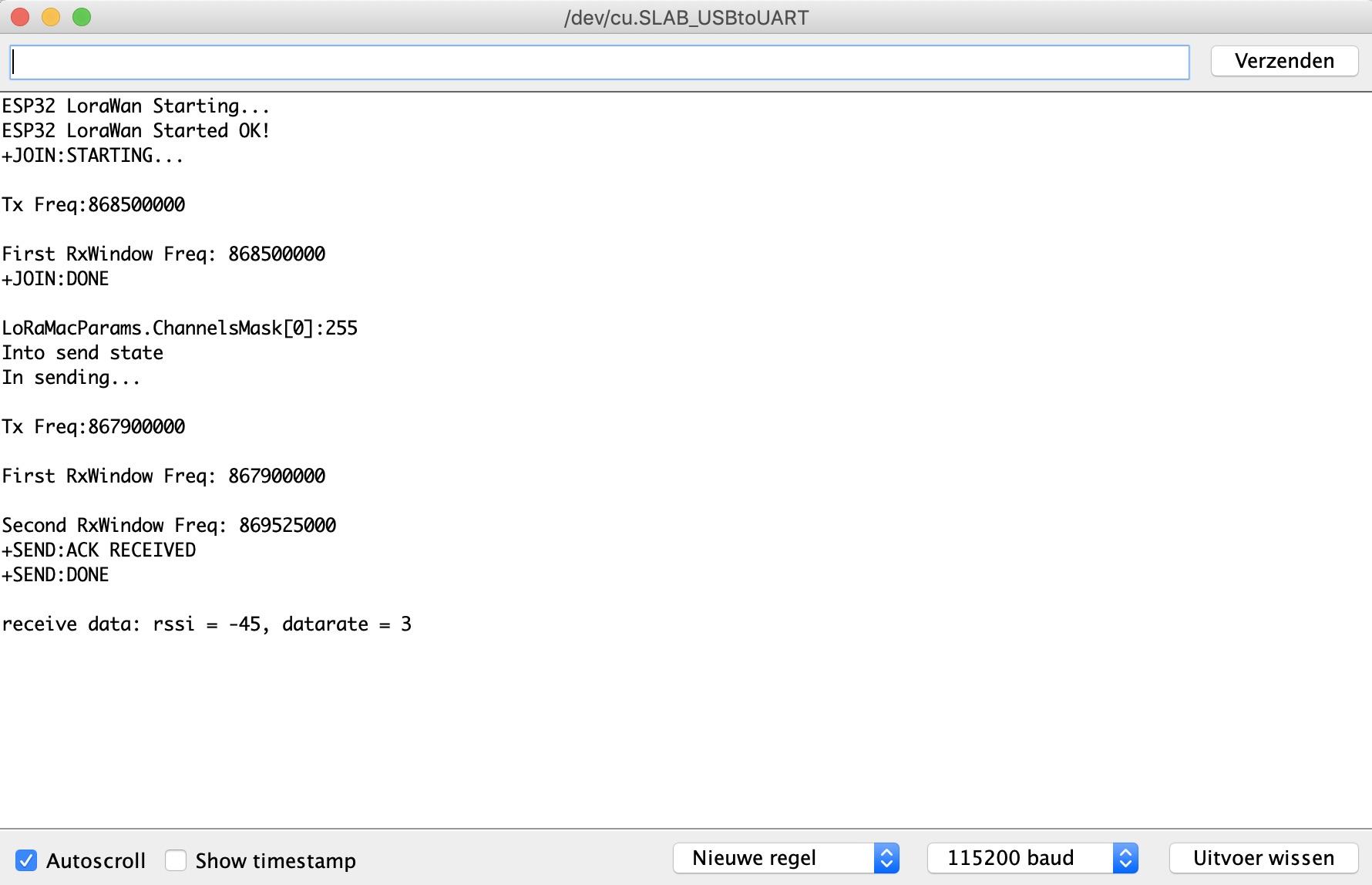
Compileer de sketch en stuur de gecompileerde code naar de Heltec WiFi LoRa 32 module. In de Seriële monitor van de Arduino omgeving is te zien dat de module verbinding probeert te maken. LoRaWAN vindt plaats op diverse frequenties in de 868 MHz band, met Tx Freq sordt aangegeven, welke frequentie is gebruikt. Met Received Signal Strength Indication (RSSI) wordt het ontvangen vermogen aangegeven in dBm, een negatief getal. Hoe dichter bij 0, hoe beter het signaal. De ervaring leert dat het minimum RSSI op -120 dBm zit (een heel zwak signaal), en dat -30 een sterk signaal aangeeft. De -45 dBm in het voorbeeld is niet zo’n heel sterk signaal en voor een gateway op enkele meters afstand voor verbetering vatbaar.
In de terminal van The Things Network is na een paar seconden te zien dat de module verbinding heeft gemaakt en data heeft verstuurd (‘Frames up’) en data heeft ontvangen (‘Frames down’):
Eigen data versturen en ontvangen
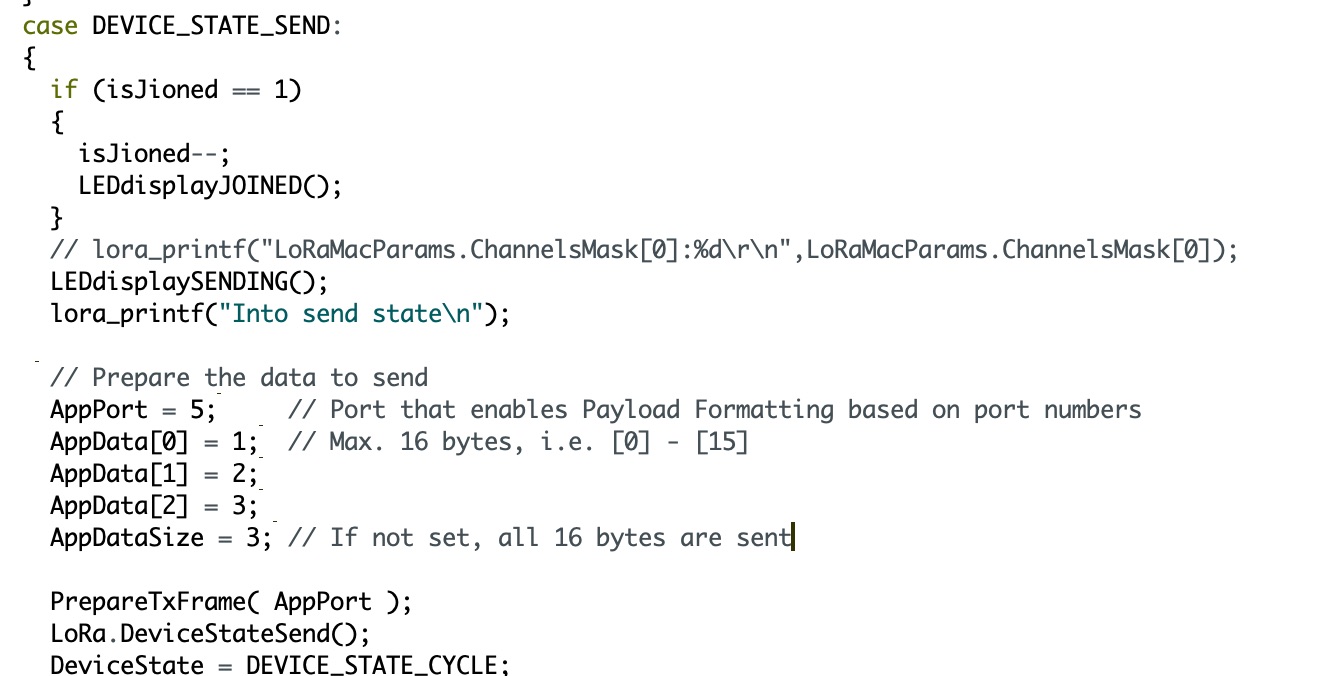
De voorbeeldsketch van Heltec verstuurt data, maar zonder dat daar iets voor is ingeregeld. Om eigen data te versturen dienen drie variabelen in de sketch te worden aangepast:
AppPort: default 2 voor demonstraties, ieder ander getal is primaAppData: array, maximaal 16 bytesAppDataSize: aantal bytes eigen data
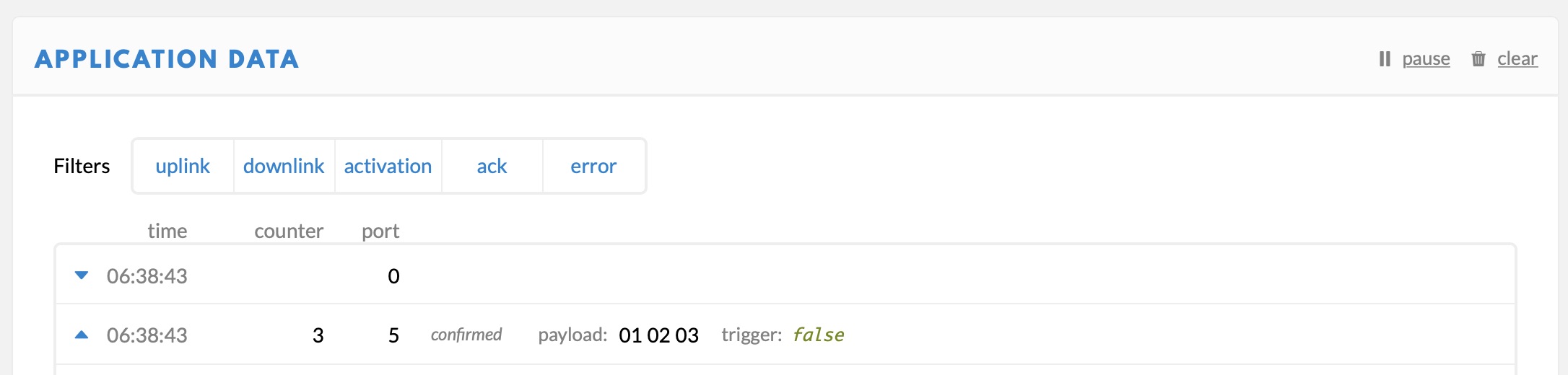
Met de aanpassing hierboven wordt de eigen data (de ‘payload’) de drie getallen 1, 2 en 3. Die zie je dan ook op The Things Network binnenkomen:
Conclusie
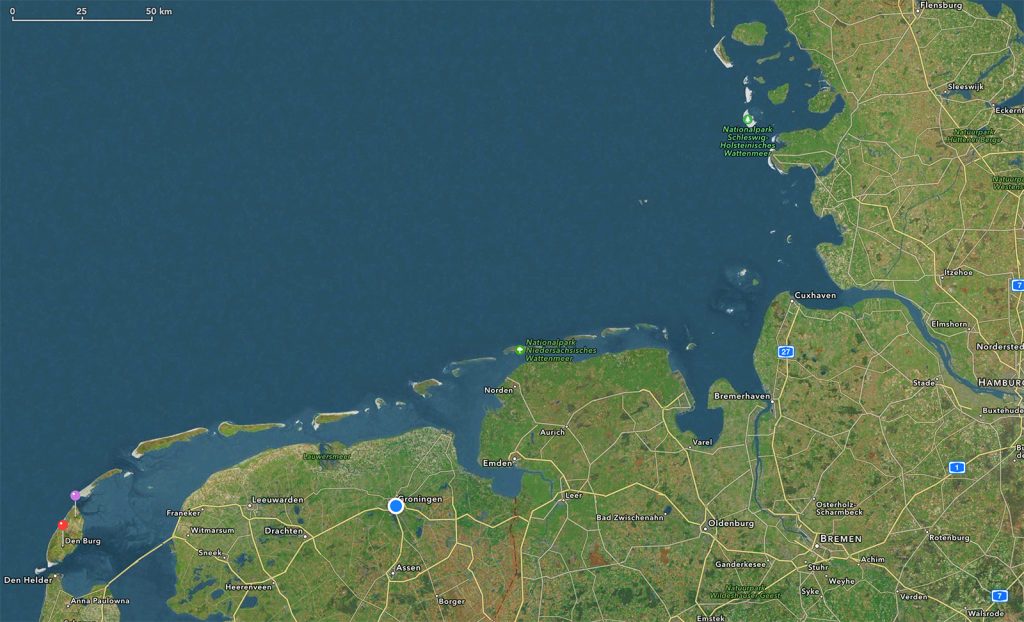
De Heltec WiFi LoRa 32 ESP32 development kit werkt eenvoudig samen met The Things Network, als je de juiste stappen in de goede volgorde uitvoert. De module vormt een goedkope en flexibele oplossing om sensoren met LoRaWAN aan het internet te koppelen. Om de typische LoRa-kilometers-afstanden te bereiken is het zaaks om een goede antenne (en kabel) te gebruiken. De signaalsterkte RSSI zal anders maar matig zijn.